
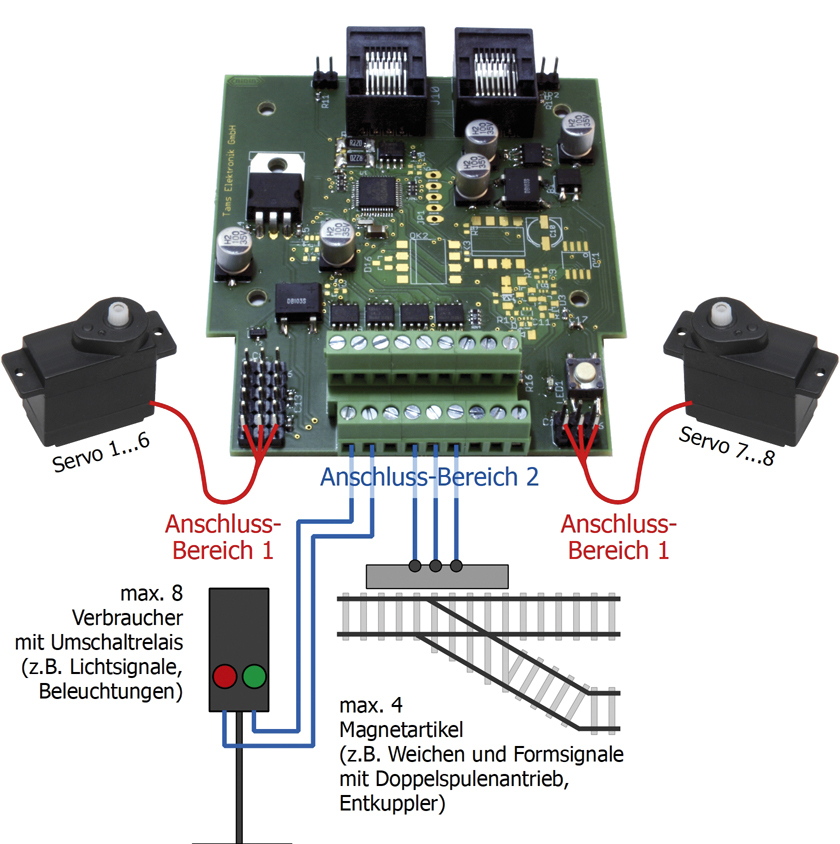
le module YD8116 est il "compatible" avec un servo-moteur pour aiguillage ?
Je n'arrive pas très bien à comprendre la différence électrique entre servo-moteur et moteur lent ?
Merci d'avance



![]() par quentin74
par quentin74
14 Mar 2023, 18:05
![]() par jc59
par jc59
14 Mar 2023, 19:07
![]() par Jacques26
par Jacques26
14 Mar 2023, 20:12

![]() par Suzdal
par Suzdal
19 Mar 2023, 20:06
![]() par fondunorvégien43
par fondunorvégien43
19 Mar 2023, 20:22
![]() par jc59
par jc59
20 Mar 2023, 09:02
fondunorvégien43 a écrit:https://rail-modelisme-alsace.fr/rma-di ... 68716.html
pour le DR4018 je dirais l'équivalent est le YD8116 si c'est pour piloté
des feux ou des moteurs MTB
![]() par Suzdal
par Suzdal
20 Mar 2023, 12:22
![]() par Rail Modélisme Alsace
par Rail Modélisme Alsace
20 Mar 2023, 13:04
Utilisateurs parcourant ce forum : Aucun utilisateur enregistré et 28 invités
{kind=link}